NVIDIA新研究:提高机器人的抓取能力
2019-10-15 19:26
 分享到微信
分享到微信
 分享到微博
分享到微博
NVIDIA在西雅图机器人实验室的研究人员开发了一种名为6-DoF GraspNet的新算法,可以让机器人抓取任意物体。
从仓储物流到服务型机器人,抓力始终是当前和未来机器人系统的重要组成部分。
想象一下,如果让一个机器人拿起一个物体并将其放进一个容器里。首先,机器人观察物体,在6D空间中决定抓取器的移动位置(空间中的x、y、z坐标平面和旋转三维空间)。需要注意的是,抓取成功与否还取决于物体和抓取器的几何形状、物体的质量分布和表面摩擦力,而这对于机器人来说实现起来是非常困难的。
用6-DoF GraspNet抓取马克杯

用6-DoF GraspNet抓取盐罐
6-DoF GraspNet的工作如下:机械手通过观察物体并规划好在6D空间(空间中的x、y、z坐标平面和旋转三维空间)中的移动路径。该算法的设计方式是生成一组可能的握持器并根据需求进行移动。然后,握持器的运行需要调用“握持评估器”,该评估器会为每个可能的握持分配一个分数。最后,握持评估器通过局部变换调整握持变量进而提高最佳握持的成功率。
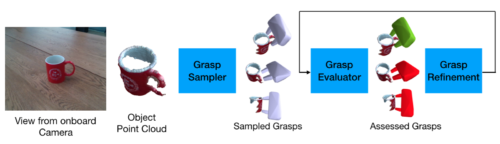
6-DoF GraspNet工作概览
基于深度学习的方法通常是数据密集型的,而收集机器人任务的训练数据是资源密集型和繁琐的。通常需要多个机器人连续几天或几个月收集数据,以获得足够的数据来训练模型。而6-DoF GraspNet使用的则是综合训练数据,它由三维对象模型和模拟的抓取体验组成。对于每个对象,使用几何启发式生成抓取假设,并使用NVIDIA FleX物理引擎进行评估。
在训练过程中,对象物体在随机视点上进行渲染生成点云,并且利用模拟的机械臂学习模型的参数。此模型使用了8个NVIDIA V100 GPU,并在随机的盒子、圆筒、杯子、碗和瓶子上进行训练。
采用NVIDIA FleX评估法
6-DoF GraspNet的优点是模块化,这使得它可以被用于各种计算机视觉应用和运动规划算法,而非端到端地解决所有问题。如何将桌上的所有物品都收起来并放入一个容器中?这个问题现在可以通过使用6-DoF GraspNet和一个分割一般物体的模型来解决了。从分割对象中提取每个对象的点云,使用6-DoFNet生成grasps。场景中的其他物体用立方体近似表示为运动规划模块的障碍物,以确保机械臂不会跟任何障碍物相撞。
从仓储物流到服务型机器人,抓力始终是当前和未来机器人系统的重要组成部分。
想象一下,如果让一个机器人拿起一个物体并将其放进一个容器里。首先,机器人观察物体,在6D空间中决定抓取器的移动位置(空间中的x、y、z坐标平面和旋转三维空间)。需要注意的是,抓取成功与否还取决于物体和抓取器的几何形状、物体的质量分布和表面摩擦力,而这对于机器人来说实现起来是非常困难的。
用6-DoF GraspNet抓取马克杯
用6-DoF GraspNet抓取盐罐
6-DoF GraspNet的工作如下:机械手通过观察物体并规划好在6D空间(空间中的x、y、z坐标平面和旋转三维空间)中的移动路径。该算法的设计方式是生成一组可能的握持器并根据需求进行移动。然后,握持器的运行需要调用“握持评估器”,该评估器会为每个可能的握持分配一个分数。最后,握持评估器通过局部变换调整握持变量进而提高最佳握持的成功率。
6-DoF GraspNet工作概览
基于深度学习的方法通常是数据密集型的,而收集机器人任务的训练数据是资源密集型和繁琐的。通常需要多个机器人连续几天或几个月收集数据,以获得足够的数据来训练模型。而6-DoF GraspNet使用的则是综合训练数据,它由三维对象模型和模拟的抓取体验组成。对于每个对象,使用几何启发式生成抓取假设,并使用NVIDIA FleX物理引擎进行评估。
在训练过程中,对象物体在随机视点上进行渲染生成点云,并且利用模拟的机械臂学习模型的参数。此模型使用了8个NVIDIA V100 GPU,并在随机的盒子、圆筒、杯子、碗和瓶子上进行训练。
采用NVIDIA FleX评估法
6-DoF GraspNet的优点是模块化,这使得它可以被用于各种计算机视觉应用和运动规划算法,而非端到端地解决所有问题。如何将桌上的所有物品都收起来并放入一个容器中?这个问题现在可以通过使用6-DoF GraspNet和一个分割一般物体的模型来解决了。从分割对象中提取每个对象的点云,使用6-DoFNet生成grasps。场景中的其他物体用立方体近似表示为运动规划模块的障碍物,以确保机械臂不会跟任何障碍物相撞。











