NVIDIA 助力宏景智驾加速自动驾驶 4D BEV 感知开发
2023-10-08 17:37
 分享到微信
分享到微信
 分享到微博
分享到微博
基于 NVIDIA DRIVE Orin,宏景智驾推出用于自动驾驶 4D BEV 感知开发的真值系统,赋能车企开发和迭代自动驾驶算法,打造安全、鲁棒的智能汽车。
在自动驾驶领域,推动感知模型学习强大的鸟瞰图(BEV)表征尤为重要。新一代感知方案将涵盖目标检测(3D BBox)、轻地图方案(Mapless)、通用障碍物检测(Occupancy)等关键技术。
目前,实现 4D BEV 感知所面临的挑战主要包括:
如何快速、低成本地构建大量高质量 4D BEV 真值数据,用于感知的训练和评价;
如何有效利用云端来实现大规模 BEV 算法的训练、加速、部署、评价等。
为了应对这些行业挑战,宏景智驾在 NVIDIA 的助力下推出了真值解决方案——Hyper-GTMax 系统。
该系统搭载了可用于车载超算的 NVIDIA DRIVE Orin 系统级芯片(SoC),并借助用于云端加速计算与 AI 的 NVIDIA 数据中心解决方案而打造。
Hyper-GTMax 系统由宏景智驾自研,配备 4 颗激光雷达、7 颗 800 万像素摄像头和 1 套高精定位模组,可提供车辆前后 250 米,左右 100 米的 4D 真值。该传感器配置能够满足汽车制造商的多样化需求。
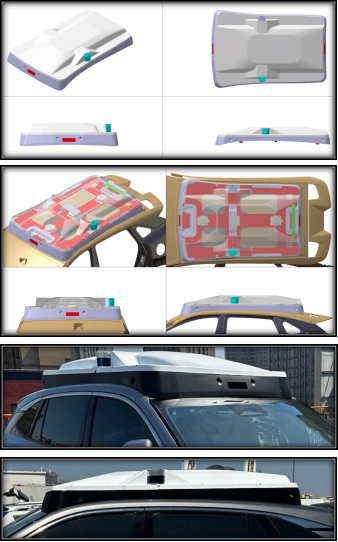
Hyper-GTMax 系统
(此图片由宏景智驾制作,如果您有任何疑问或需要使用此图片,请联系宏景智驾)
由 NVIDIA 赋能的这套解决方案支持 BEV 模型训练,精度有保障;支持感知模块(摄像头、毫米波雷达、激光雷达等)的“工程化评价”(可以直观地实现可视化并在迭代中改进);同时该系统可用于 ADAS 里程测试的“自动问题分析”。(针对长里程测试的自动化场景挖掘,例如大车插入、匝道汇流等,以便在投产前更好的提取并分类问题。)
4D BEV 目标真值
4D Occupancy 真值
(以上视频由宏景智驾制作,如果您有任何疑问或需要使用此视频,请联系宏景智驾)
搭载 NVIDIA DRIVE Orin 的宏景智驾真值系统解决方案具备多种优势:
4D 感知精度高:除传统标注之外,提供 4D 目标、4D BEV 地图、 4D Occupancy 检测等高阶真值数据;
感知距离远:提供 500 米(前后)、200 米(左右)的综合真值感知;
NVIDIA DRIVE 生态支持:快速帮助宏景智驾及合作伙伴构建 AI 基础设施,高效赋能合作伙伴大规模数据训练、加速、推理、集成等能力;
加速车辆开发:一键式 4D 真值获取,简化开发流程;
更高性价比。
该系统可快速、高效地搭载在 OEM 的量产车上。在开发过程中可提供大量高质量 4D 真值,高效助力客户从 0 到 1 构建高阶感知开发能力,提升开发效率,大幅降低量产成本并加速交付。











