NVIDIA 自动驾驶实验室:为汽车生成基于 AI 的事故场景
2023-02-28 11:19
 分享到微信
分享到微信
 分享到微博
分享到微博
以下为本期的 NVIDIA 自动驾驶实验室视频,将为大家介绍 NVIDIA 最近开展的一项研究,即利用 AI 自动生成仿真事故场景,来进行安全且可扩展的自动驾驶汽车测试:
现实世界中存在着各种类型的交通状况,自动驾驶汽车必须能够安全应对以上状况。其中包括由于车距较近导致的危险事故,在这种状况下,其他道路使用者在行驶过程中进行的意外操作可能导致碰撞事故发生。

然而,对开发人员而言,在这些类型的场景中开发和测试自动驾驶汽车极具挑战性。因为现实世界中这类碰撞数据十分罕见,此外,若要在现实世界中重现此类情况来进行测试则极不安全,并且该方法难以扩展并实现规模化。
利用 STRIVE 算法
对自动驾驶汽车规划模块进行压力测试
在自动驾驶汽车堆栈中,规划模块负责决定车辆应如何行驶。若要对规划模块进行全面的测试,则需要收集真实且多样化的潜在交通事故场景数据集。
NVIDIA 开发了名为 STRIVE(压力试驾)的算法,可为自动驾驶汽车的规划模块训练创建丰富的事故场景(图 1)。开发人员可通过分析该模块在仿真场景中的存在的规划短板,在自动驾驶汽车上路前进行纠正,以便改善车辆的规划行为。
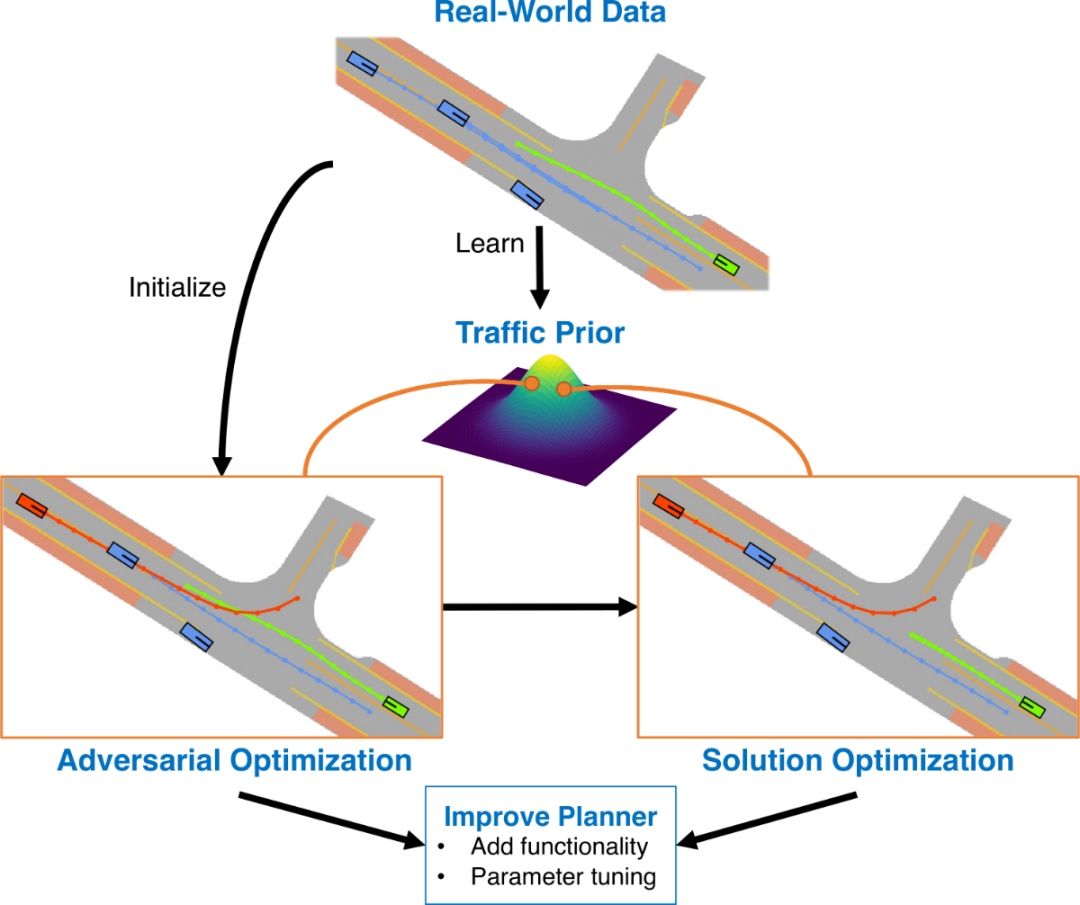
图 1:STRIVE 生成自动驾驶汽车的交通事故场景
利用优化方式生成潜在事故场景
STRIVE 算法从真实世界场景着手,使目标测试车辆按照预期规划行驶。而后,STRIVE 利用对抗优化来修改场景中其他车辆的 2D 轨迹,以生成碰撞场景。其中,用于与自动驾驶汽车碰撞的干扰车辆可以由用户进行指定,也可由 STRIVE 在优化过程中自动选择。
该解决方案中的另一项优化是训练自动驾驶汽车生成机动策略,来避免交通事故的发生,从而提高自动驾驶汽车的规划能力。STRIVE 创建了真实且多样化的事故场景,并提供了实用的解决方案以改善自动驾驶,如图 2 所示。
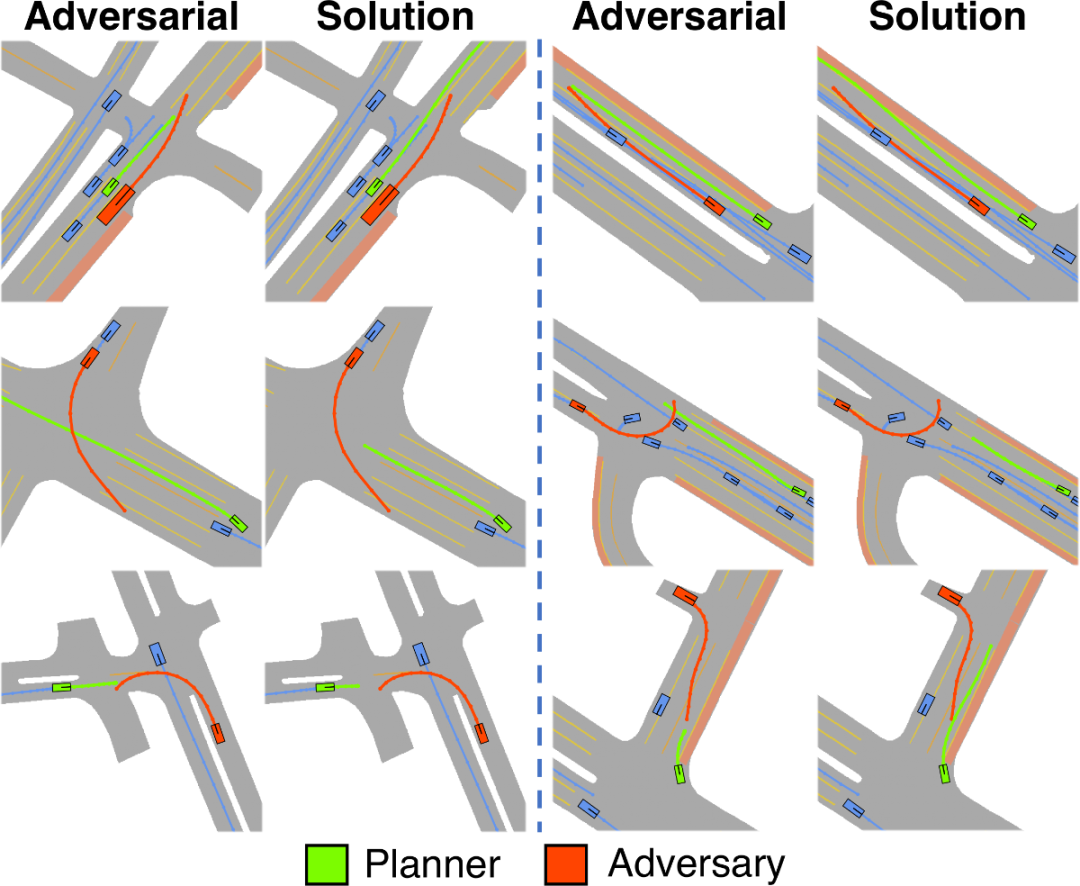
图 2:STRIVE 生成的潜在事故和解决方案示例
数据驱动型交通模型的真实性
仿真事故场景必须真实且能精确反映现实世界的交通状况和物理环境。STRIVE 使用 AI 交通模型,基于大型真实世界数据集进行自动驾驶汽车训练,以了解现实中车辆的行驶轨迹。该模型显示为“Traffic Prior”,如图 1 所示。
在优化过程中,STRIVE 使用经过训练的 AI 模型进行检查,以确保其生成的场景真实有效,即场景中需包含事故状况。
从 2D 轨迹到 3D 仿真
STRIVE 在 NVIDIA DRIVE Sim 中运行,基于十字交叉路口创建多种事故场景。STRIVE 会基于现实世界的驾驶行为,进行常规交通重建,而后创建各种自动驾驶汽车可能会与不同的车辆产生的交通事故(图 3)。

图 3:NVIDIA DRIVE Sim 中产生的潜在事故,每个事故都来自对应的真实场景
结论
STRIVE 能够在仿真中自动创建罕见且危险的潜在事故场景。自动驾驶开发人员可借助 STRIVE 算法,对自动驾驶系统进行全面训练和评估,以确保其行为的安全性。
生成车辆之间可能发生的碰撞场景只是利用 AI 进行交通场景仿真的一个用例。NVIDIA 正着力将数据驱动型模型纳入所有类型的交通场景仿真之中,包括行人、自行车骑行者和场景编辑等领域。
NVIDIA DRIVE 相关资源
如需了解更多信息,请查看以下相关资源:
STRIVE 项目页面
:
https://nv-tlabs.github.io/STRIVE/
通过学习交通先例生成实用的事故易发驾驶场景:
https://nv-tlabs.github.io/STRIVE/docs/strive.pdf
GitHub 上的 STRIVE 代码
:
https://github.com/nv-tlabs/STRIVE
由 Omniverse 驱动的 DRIVE Sim 场景重建:
https://www.nvidia.cn/self-driving-cars/simulation/











