麻省理工学院最新研究成果:如何让机器人更好地操纵物体
2019-06-13 09:00
 分享到微信
分享到微信
 分享到微博
分享到微博
想象一下这样一个机器人,它可以有效地制作粘土,将冰淇淋盛到筒里,或者用模子把米饭卷进寿司。
麻省理工学院的研究人员开发了一种基于深度学习的算法,该算法可以提高机器人将材料塑造成形状的能力,并使其能够与液体和固体物体相互作用。
这项成果的灵感来源是人类与不同物体的互动方式。
“我们人类在头脑中会有一个直观的物理模型,可以想象推动或挤压物体时,物体的行为方式变化。基于这种直观的模型,人类可以完成远远超出当前机器人范围的惊人操作任务,“麻省理工学院研究生Yunzhu Li说。 “我们希望为机器人构建这种直观的模型,使他们能够做人类可以做的事情。”
该工作的关键是一个叫做DPI-Nets的粒子交互网络。该网络可以学习不同材料如何相互作用。然后,系统创建动态交互图,捕捉将一个粒子传递到另一个粒子的交互。在模拟中,颗粒表示为小球体,由液体或可变形物体组合而成。
在上面的视频中,一个名为RiceGrip的机器人夹住了由可变形泡沫制成的不同物体。机器人经过训练可以与这些物体相互作用,所以抓手知道它应该使用多大的力。如果模拟粒子与真实世界的粒子位置不对齐,系统会向模型发送错误信号,帮助它学习如何更好地处理材料。
“在涉及复杂物理性质的可变形物体的操作任务中,我们的机器人通过学习DPI-Nets取得了成功,例如将橡皮泥模塑成目标形状,”研究人员介绍称。
模拟器是使用基于粒子的仿真系统NVIDIA FleX构建的。
借助NVIDIA TITAN Xp GPU和cuDNN加速的PyTorch深度学习框架,该团队在包含不同对象和交互的四种不同环境中,对数千种不同的部署进行了训练。训练之后,该算法依赖于GPU进行推理。
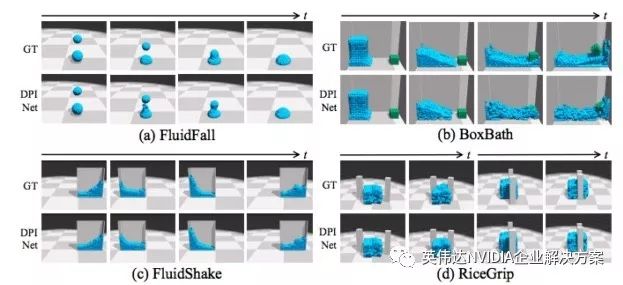
四种不同的环境中,基本事实(GT)与我们模型(DPI-Net)推出结果之间的对照。(a)FluidFall——两滴高粘度流体正在下落并相互融合。(b)BoxBath——水冲洗刚性立方体。(c)FluidShake——摇动一箱液体。(d)RiceGrip——抓住可弹性和塑性变形的物体(例如糯米)。
“我们已经证明,经过学习的粒子动力学模型可以模拟近似于不同物体的相互作用,并且帮助解决可变形物体的复杂操作任务,”研究人员说。 “我们的系统需要标准的开源机器人和深度学习工具包,并且可以部署在家庭和制造环境中。”











