 分享到微信
分享到微信
 分享到微博
分享到微博
内容介绍
NVIDIA利用摄像头图像训练了基于摄像头的深度神经网络(DNN)AutoHighBeamNet,它可以为车辆的远光灯系统自动生成控制输出,从而提高夜间行驶的视野范围和安全性。
自动驾驶实验室
这是NVIDIA DRIVE Labs自动驾驶实验室系列视频的第十三集,在上一集中我们讲了特征追踪如何为自动驾驶保驾护航。在自动驾驶实验室系列视频中,我们将以工程技术为重点的视角关注实现自动驾驶汽车的各个挑战以及NVIDIA DRIVE AV软件团队如何应对这些问题。
任务:
自动可靠的远光灯控制
方法:
AutoHighBeamNet
如今,AI可以使汽车在黑暗中更容易看见路况,同时确保其他车辆中的驾驶员不会被灯光影响。
远光灯可以大大增加大灯的夜间可视范围,但同时它们也会产生眩光给其他驾驶员造成危险。大多数商业上可用的远光灯系统仍然需要手动开关控制,这可能会给驾驶员造成混乱和麻烦,从而导致远光灯没有被充分利用或被误用。
在本期的自动驾驶实验室视频中,我们将介绍AI如何克服局限性,使用感知来减少迎面驶来的车辆大灯所造成的眩光。
我们利用摄像头图像训练了基于摄像头的深度神经网络(DNN)AutoHighBeamNet,它可以为车辆的远光灯系统自动生成控制输出,从而提高夜间行驶的视野范围和安全性。AutoHighBeamNet无需根据场景中其他光源的照度水平来生成远光灯控制信号,而是能够从更广泛的驾驶场景中学习,以实现真正自主可靠的远光灯控制。
深度神经网络对摄像头图像中感知到正在行驶的车辆做出反应。任何一辆行驶中的汽车都会被定义为打开前大灯或尾灯的汽车。AutoHighBeamNet会把路边停放的所有灯都熄灭的汽车定义为非活动车辆。
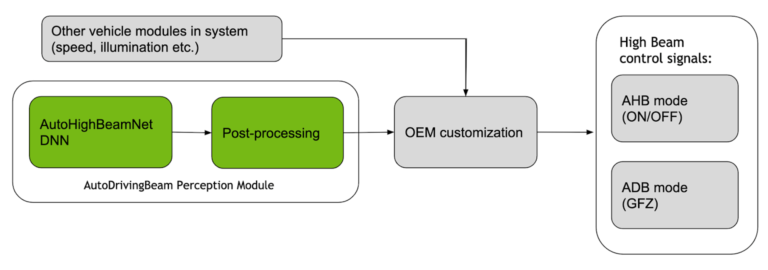
AutoHighBeamNet是AutoDrivingBeam视觉感知模块的一部分,该模块从单眼前视摄像头获取图像数据(如图1所示)。
每帧AutoHighBeamNet检测结果将会输入到后处理子模块中,该子模块能够执行每帧和时间的后处理。随后,AutoDrivingBeam模块的输出可以由汽车制造商进行定制,根据来自其他车辆模块的输入信号(例如,汽车本身的速度,环境照明条件等)调整适应其相应规则和政策。基于这些定制,最终产生远光灯控制信号。
远光灯控制信号可以采用两种不同的模式:自动远光灯(AHB)模式,它提供二进制开/关控制;自适应驱动光束(ADB)模式,可精确控制各个远光LED阵列以创建无眩光区域(GFZ)。
AHB模式
在AHB模式下(如图2所示),车辆的远光灯将在夜间照明不佳的情况下自动打开。但是当检测到行驶中的车辆进入视野范围时,远光灯会自动关闭并切换为近光灯。车辆远离后,远光灯将自动重新打开。

图2.自动开/关远光灯控制示例。
ADB模式
自适应驱动光束(ADB)是远光灯控制的新标准。如图3所示,在ADB模式下,车辆通过使远光灯LED阵列前照灯中的各个LED变暗来防止给远处行驶车辆中的驾驶员造成眩光。这种选择性调光可根据交通模式的需要创建无眩光区域。
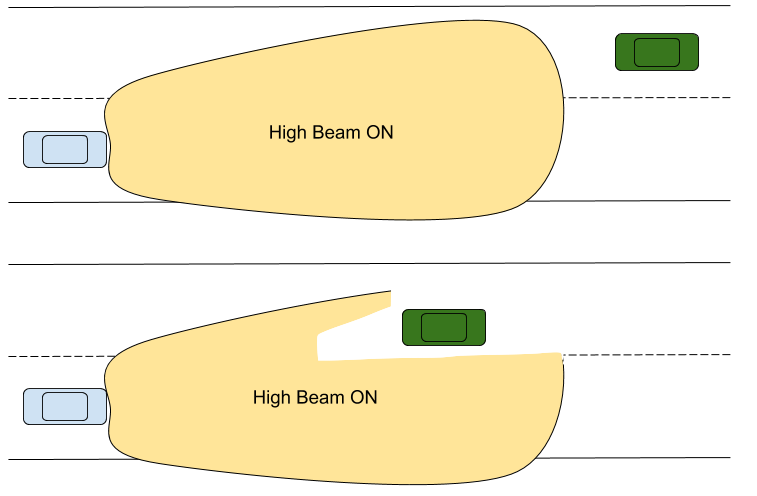
图3.自适应驱动光束控制示例。
与AHB模式相似,在车辆离开检测范围后,变暗的区域将自动变回全亮度状态。因此,在ADB模式下始终可以保持远光灯开启,以提高夜间行驶的安全性,同时也不会引起其他道路使用者眩光。
ADB模式已于2016年在欧洲被允许采用。尽管尚未获得美国市场的批准,但ADB也在接受美国国家公路交通安全管理局(NHTSA)的积极评估。
无眩光区域
在ADB模式下,无眩光区域(GFZ)是一种数据结构,旨在表示在摄像头可感知的帧中应完全避免使用远光灯或使用减弱远光灯以避免发生反射的区域。
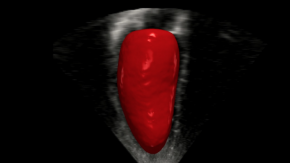
图4说明了基于矩阵LED的照明系统的无眩光区域输出示例,其中每个LED均可单独控制。

图4.矩阵LED远光系统无眩光区域示例
无眩光区域输出用于感知摄像头坐标。将无眩光区域规划与车辆照明系统相协调需要一个校准的过程。校准工具及其流程与特定的车辆设置和与ADB兼容的照明系统选择紧密相关。
NVIDIA远光控制模块的API将在NVIDIA DRIVE软件10.0版中提供对AHB模式的支持,同时也会公布相关信息,供开发者和汽车制造商根据自己的需求定义远光灯控制策略。

订阅英伟达 NVIDIA 技术月刊


