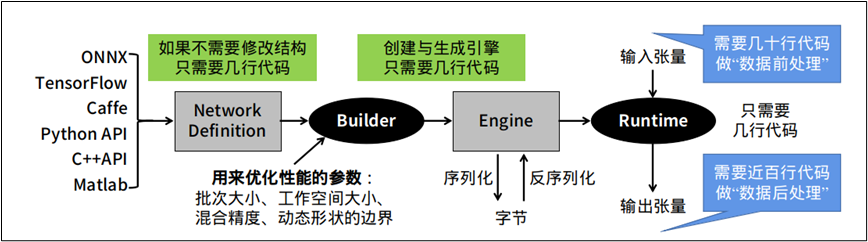
很多开发人员在转换完 TensorRT 加速引擎之后,最后准备调用起来执行推理任务的时候,就遇到一些障碍。这个环节是需要开发人员自行撰写相关代码,去执行读入数据(前处理)、执行推理、显示结果(后处理)等工作,如下图最右边的部分。
这部分的麻烦之处,在于每个神经网络的结构不相同,并没有“通用”的代码可以适用于大部分的网络结构,需要针对指定神经网络去撰写对应的代码,最重要是需要清除这个模型的输入 (input bold) 与输出 (outpold) 的名称与张量结构。
本文以前面在 TAO 工具套件中使用的 ssd 神经网络为范例,提供基础的“前后处理”范例代码给读者参考,这是从 NVIDIA 中国区开发者社区所举办过多届 “Sky 黑客松”比赛中,所提供的开源内容中提取的重点,主要如下:
1、数据前处理:
def _preprocess_trt(img, shape=(300, 300)): """TRT SSD推理前的数据前处理""" img = cv2.resize(img, shape) img = img.transpose((2, 0, 1)).astype(np.float32) return img
这里 “shape=(300,300)” 为张量的尺度,根据模型训练时的长宽两个变量,至于 transpose 里的 (2,0,1) 是固定的,不需调整。
2、数据后处理:
def _postprocess_trt(img, output, conf_th, output_layout): """TRT SSD推理后的结果的数据处理步骤.""" img_h, img_w, _ = img.shape boxes, confs, clss = [], [], [] for prefix in range(0, len(output), output_layout): index = int(output[prefix+0]) conf = float(output[prefix+2]) if conf < conf_th: continue x1 = int(output[prefix+3] * img_w) y1 = int(output[prefix+4] * img_h) x2 = int(output[prefix+5] * img_w) y2 = int(output[prefix+6] * img_h) cls = int(output[prefix+1]) boxes.append((x1, y1, x2, y2)) confs.append(conf) clss.append(cls) return boxes, confs, clss # 返回标框坐标、置信度、类别
这里最重要的 x1, y1,x2, y2 坐标值,必须根据 SSD 神经网络所定义的规范去进行修改,其他部分可以通用于大部分神经网络。
3、定义 TrtSSD 类封装运行 TRT SSD 所需的东西:
class TrtSSD(object):# 加载自定义组建,如果TRT版本小于7.0需要额外生成flattenconcat自定义组件库 def _load_plugins(self): if trt.__version__[0] < \'7\': ctypes.CDLL("ssd/libflattenconcat.so") trt.init_libnvinfer_plugins(self.trt_logger, \'\')#加载通过Transfer Learning Toolkit生成的推理引擎 def _load_engine(self): TRTbin = \'ssd/TRT_%s.bin\' % self.model #请根据实际状况自行修改 with open(TRTbin, \'rb\') as f, trt.Runtime(self.trt_logger) as runtime: return runtime.deserialize_cuda_engine(f.read())#通过加载的引擎,生成可执行的上下文 def _create_context(self): for binding in self.engine: size = trt.volume(self.engine.get_binding_shape(binding)) * \ self.engine.max_batch_size##注意:这里的host_mem需要使用pagelocked memory,以免内存被释放 host_mem = cuda.pagelocked_empty(size, np.float32) cuda_mem = cuda.mem_alloc(host_mem.nbytes) self.bindings.append(int(cuda_mem)) if self.engine.binding_is_input(binding): self.host_inputs.append(host_mem) self.cuda_inputs.append(cuda_mem) else: self.host_outputs.append(host_mem) self.cuda_outputs.append(cuda_mem) return self.engine.create_execution_context()# 初始化引擎 def __init__(self, model, input_shape, output_layout=7): self.model = model self.input_shape = input_shape self.output_layout = output_layout self.trt_logger = trt.Logger(trt.Logger.INFO) self._load_plugins() self.engine = self._load_engine() self.host_inputs = [] self.cuda_inputs = [] self.host_outputs = [] self.cuda_outputs = [] self.bindings = [] self.stream = cuda.Stream() self.context = self._create_context()# 释放引擎,释放GPU显存,释放CUDA流 def __del__(self): del self.stream del self.cuda_outputs del self.cuda_inputs# 利用生成的可执行上下文执行推理 def detect(self, img, conf_th=0.3): img_resized = _preprocess_trt(img, self.input_shape) np.copyto(self.host_inputs[0], img_resized.ravel()) # 将处理好的图片从CPU内存中复制到GPU显存 cuda.memcpy_htod_async( self.cuda_inputs[0], self.host_inputs[0], self.stream) # 开始执行推理任务 self.context.execute_async( batch_size=1, bindings=self.bindings, stream_handle=self.stream.handle) # 将推理结果输出从GPU显存复制到CPU内存 cuda.memcpy_dtoh_async( self.host_outputs[1], self.cuda_outputs[1], self.stream) cuda.memcpy_dtoh_async( self.host_outputs[0], self.cuda_outputs[0], self.stream) self.stream.synchronize() output = self.host_outputs[0] return _postprocess_trt(img, output, conf_th, self.output_layout)
上面三个部分对不同神经网络都是不同的内容,如果要参考 YOLO 神经网络的对应内容,推荐参考 https://github.com/jkjung-avt/tensorrt_demos 开源项目,里面有完整的 YOLOv3 与 YOLOv4 的详细内容。
本文的开源代码可以在此链接下载完整的内容与配套的工具。
https://pan.baidu.com/s/1fGLBnzqtnRNpfD3PbileOA 密码: 99et

 分享到微信
分享到微信
 分享到微博
分享到微博











