
第二届 Sky Hackathon 大赛收官,这支团队凭什么蝉联冠军
2020-10-20 15:35
 分享到微信
分享到微信
 分享到微博
分享到微博
历时一个半月,由 NVIDIA 开发者社区主办的第二届 Sky Hackathon 大赛,在经历了线上说明和线上测试后,终于在 10 月 18日下午决赛后落下了帷幕。
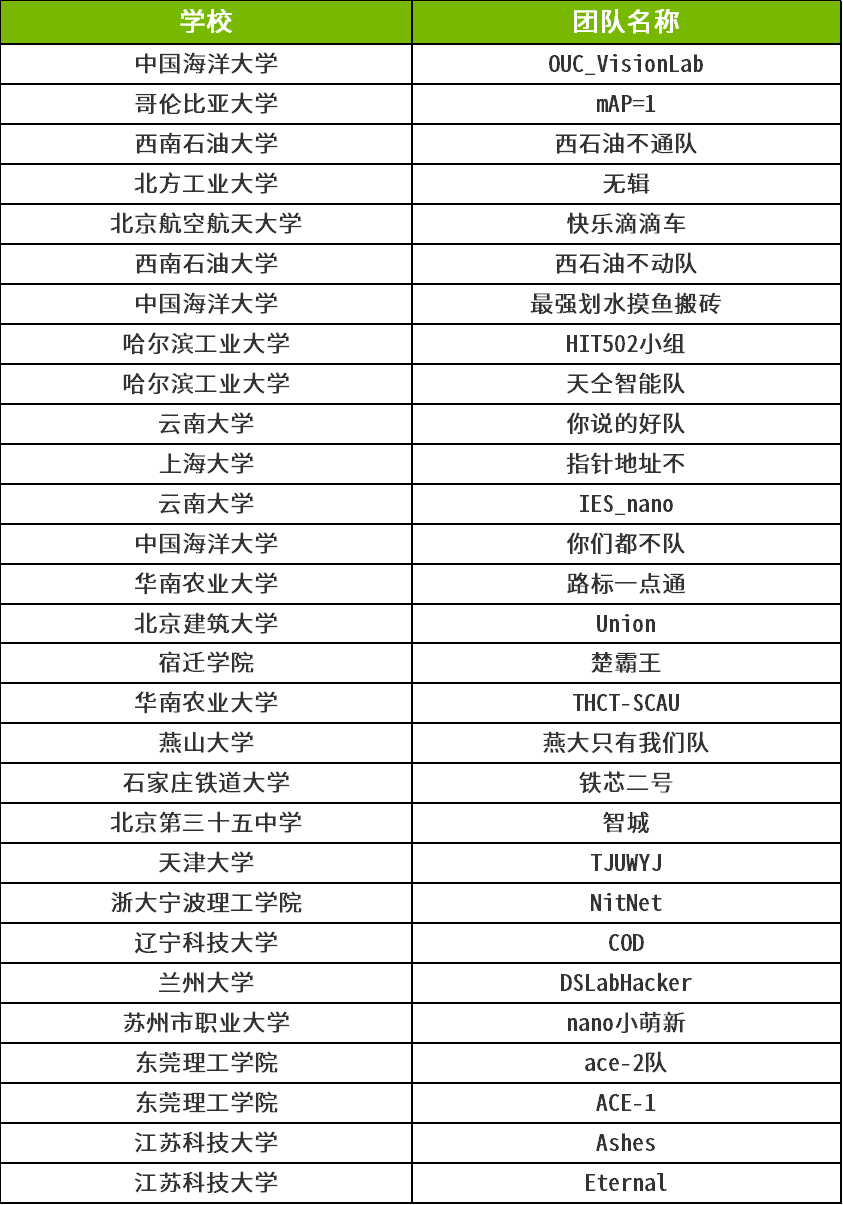
在本次大赛中,44 支队伍(近 200 名参赛队员)报名,到最后 29 支队伍(超百名队员)坚持到决赛环节,提交了项目报告书,并完成了所有比赛任务。
29 支参赛队伍大揭秘
Jetson Nano 助力 Sky Hackathon 大赛圆满落幕
本届 Sky Hackathon 大赛的主题是 Nano 识路标,每组参赛队伍需要自行分工,收集交通路标数据集并标注用于训练。然后利用收集好的数据集,使用 NVIDIA Transfer Learning Toolkit 进行模型训练、优化及导出,再利用 TensorRT 将训练好的模型部署在由吉浦迅科技提供的远程 Jetson Nano 云平台上,并进行测试优化。
正式比赛时,组委会会提供一段比赛视频和评分系统。每个参赛队伍需要利用评分系统和最终的测试视频进行对程序的评分。评分系统根据识别结果自动打分。
比赛结果
前三甲团队分别是:
中国海洋大学 — OUC_VisionLab 团队
华北电力大学/北京邮电大学组合团体 — mAP=1 队
西南石油大学 — 西石油不通队团队
而中国海洋大学是继获得第一届 Sky Hackathon 冠军后,蝉联第二届冠军。像大多数参赛队伍一样,他们的交通标志数据集主要来自两部分:网络数据集搜集以及自己实验室数据集拍摄,包括各种场景。其中以网络搜集数据为主。数据集的标注情况同样分为两部分,一个是来自网络数据集自带的标注信息,一个是人工对自己的拍摄数据集以及网络数据集进行手动标注。
“我们使用的是 resnet18 和 resnet34 训练了两个模型。训练之前先对数据集进行清洗,去除无效的数据,然后对图片进行 resize 到 416*416,并且,手动对标签格式进行转换。训练 train 和 retain 大约是 300-500 个 epoch,时间大约是2-4小时,剪枝参数设置的是 0.5,是速度与精度比较平衡的一个值。”来自中国海洋大学 OUC_VisionLab 团队队长丁来辉同学介绍说。
对数据集进行一系列的预处理步骤以及格式的转换,利用 TLT 迁移学习训练自己的数据集,进行模型的训练以及修改配置文件,模型优化剪枝后重新训练。导出模型生成 engine 后进部署到 Jetson Nano 上进行推理,验证模型精度,检验实际效果并查找问题分析缺陷,根据分析后问题进行自我调整和更正,对其中的参数部分进行修改,以达到和模型相匹配并且实验效果最好的数据。
这个过程的亮点在于队伍成功利用 TLT 将模型进行压缩,将最终的模型压缩到只有 1.4M 大小,在保证高精度的同时大大的提升了推理速度。这也是他们能够在精度和速度的测评上有非常好的表现的直接原因。
而第二名“华北电力大学 / 北京邮电大学”组合团队,他们在权衡了主流的一阶段算法 SSD 和 YOLO 之后,决定采用 YOLO v5 的模型,看中了其在速度和精度端都有很好的表现。并且利用 C++ 实现内核推理任务,在实际应用的过程中,极大地加速了程序运行的效率,在最终精度和速度的测评上取得了优异的成绩。
在所有参赛队伍中,还有一支特殊的团队,是来自北京第 35 中学的中学生团队,他们在指导老师杨静娴和李娟带领下虽然面临中学期中考试等繁重学习压力,也坚持完成了整个比赛。

西南石油大学文烁杰同学表示:“参加本次活动一是培养了团队的团队协作意识,特别是对于配置环境,需要大量的数据集并且进行标注,数据的优劣又直接决定了模型的好坏,所以数据的收集和标注尤为重要,通力合作才能成功;二是使用 TLT 工具包更方便我们进行深度学习,但我们还是要去学习深度学习的理论基础,以能够有更深度的理解并进行使用。”
辽宁科技大学的韩兴宇同学表示:“人工智能是我一直向往的领域,但目前学习生涯还很难有所探索,感谢比赛给我的这个机会,这给我前往人工智能领域指引了方向,我也希望在未来的日子里,能够有机会推动整个领域的发展。”











