一文了解 Isaac Sim 2020.1 测试版【附下载地址】
2020-02-25 19:32
 分享到微信
分享到微信
 分享到微博
分享到微博
近日,NVIDIA 发布了基于 NVIDIA Omniverse 的新一代 Isaac Sim 测试版。
Isaac Sim 有什么新功能?
一年前,NVIDIA 发布了第一代名为 Isaac Sim 的应用程序,该应用程序可提供 3D 仿真环境,旨在通过 NVIDIA Isaac SDK 进行机器人开发。对于 Isaac 团队来说,2019 年是充实的一年,该年同时发布了多个版本的 Isaac SDK 和 Isaac Sim。Isaac Sim 的第一代发行版主要支持 “Carter” 机器人基于激光雷达的导航,该机器人是基于 Unreal Engine 4 游戏引擎构建的。Isaac Sim 的第二个迭代,也被称为“NavSim”,是基于 Unity Engine 构建的。
如今,NVIDIA 的 SimTech 团队非常兴奋,因为他们提供了基于 Omniverse 套件构建的下一代 Isaac Sim 测试版。Omniverse 套件是利用 NVIDIA Omniverse 平台的强大功能进行协作仿真工作流的应用程序和工具集。Isaac Sim 2020.1 测试版取代了早期 Isaac Sim 发行版的“Carter”导航用例,着重于“Leonardo”示例处理应用程序。NVIDIA 创始人兼首席执行官黄仁勋最近在 GTC CHINA 2019 上的主题演讲中介绍了该应用程序(扫描文末海报二维码观看主题演讲回放)。
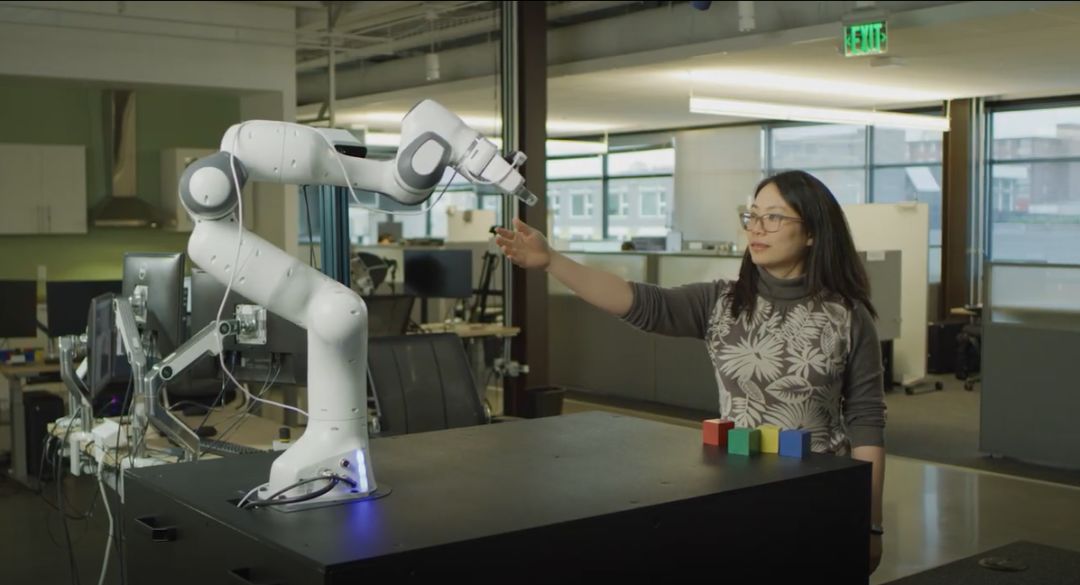
Leonardo 机器人执行了一些任务,例如检测和堆叠彩色方块以及从人的手中拿到一个方块。Leonardo 的大部分开发工作、训练和测试都是由 Isaac Sim 执行的。Isaac Sim 提供的高物理准确性和视觉保真度有助于缩小由 Franka Emika 机械手支持的物理 Leonardo 和其模拟数字孪生机器人之间的差距。
Isaac Sim:现已支持 Omniverse 套件
Isaac Sim 2020. 1 版本能够利用功能强大的 Omniverse 套件来构建下一代机器人仿真。重点包括:
RTX 图形
-- 光线和路径追踪渲染器,旨在实现最新的视觉保真度和高性能
-- 可扩展到多个 GPU、多个节点
-- 基于物理的 MDL 材料
PHYSX 5.0
-- 用于稳健的多关节动力学的关节运动 TGS(Temporal Gauss-Seidel)求解器
-- GPU 物理支持
PYTHON 用户可编程
-- 基于 USD 的场景管理脚本
-- 用于物理、摄像头、目标对象、网格、材料和用户界面的 API
Isaac Sim 2020.1 测试版提供了 Leonardo 项目中的示例,以探索其下一代仿真平台的主要功能。此版本以容器的形式提供,可以在配备 RTX 的 AWS 上运行,并可以流式传输到用户的桌面。这种基于云的交付无需任何本地 NVIDIA RTX GPU,即可为任何台式机系统提供最新的 RTX 图形和性能。
当 Leonardo 遇见 Carter
今年晚些时候,Isaac Sim 2020.1 通用版本将统一支持 Isaac SDK 构建的操纵和导航应用程序的仿真。关注 GTC 2020,了解有关 Isaac Sim 和即将发布的更多新闻。
点击“Isaac Sim 2020.1 测试版”,立即下载!
Isaac Sim 有什么新功能?
一年前,NVIDIA 发布了第一代名为 Isaac Sim 的应用程序,该应用程序可提供 3D 仿真环境,旨在通过 NVIDIA Isaac SDK 进行机器人开发。对于 Isaac 团队来说,2019 年是充实的一年,该年同时发布了多个版本的 Isaac SDK 和 Isaac Sim。Isaac Sim 的第一代发行版主要支持 “Carter” 机器人基于激光雷达的导航,该机器人是基于 Unreal Engine 4 游戏引擎构建的。Isaac Sim 的第二个迭代,也被称为“NavSim”,是基于 Unity Engine 构建的。
如今,NVIDIA 的 SimTech 团队非常兴奋,因为他们提供了基于 Omniverse 套件构建的下一代 Isaac Sim 测试版。Omniverse 套件是利用 NVIDIA Omniverse 平台的强大功能进行协作仿真工作流的应用程序和工具集。Isaac Sim 2020.1 测试版取代了早期 Isaac Sim 发行版的“Carter”导航用例,着重于“Leonardo”示例处理应用程序。NVIDIA 创始人兼首席执行官黄仁勋最近在 GTC CHINA 2019 上的主题演讲中介绍了该应用程序(扫描文末海报二维码观看主题演讲回放)。
Leonardo 机器人执行了一些任务,例如检测和堆叠彩色方块以及从人的手中拿到一个方块。Leonardo 的大部分开发工作、训练和测试都是由 Isaac Sim 执行的。Isaac Sim 提供的高物理准确性和视觉保真度有助于缩小由 Franka Emika 机械手支持的物理 Leonardo 和其模拟数字孪生机器人之间的差距。
Isaac Sim:现已支持 Omniverse 套件
Isaac Sim 2020. 1 版本能够利用功能强大的 Omniverse 套件来构建下一代机器人仿真。重点包括:
RTX 图形
-- 光线和路径追踪渲染器,旨在实现最新的视觉保真度和高性能
-- 可扩展到多个 GPU、多个节点
-- 基于物理的 MDL 材料
PHYSX 5.0
-- 用于稳健的多关节动力学的关节运动 TGS(Temporal Gauss-Seidel)求解器
-- GPU 物理支持
PYTHON 用户可编程
-- 基于 USD 的场景管理脚本
-- 用于物理、摄像头、目标对象、网格、材料和用户界面的 API
Isaac Sim 2020.1 测试版提供了 Leonardo 项目中的示例,以探索其下一代仿真平台的主要功能。此版本以容器的形式提供,可以在配备 RTX 的 AWS 上运行,并可以流式传输到用户的桌面。这种基于云的交付无需任何本地 NVIDIA RTX GPU,即可为任何台式机系统提供最新的 RTX 图形和性能。
当 Leonardo 遇见 Carter
今年晚些时候,Isaac Sim 2020.1 通用版本将统一支持 Isaac SDK 构建的操纵和导航应用程序的仿真。关注 GTC 2020,了解有关 Isaac Sim 和即将发布的更多新闻。
点击“Isaac Sim 2020.1 测试版”,立即下载!











